Kalkulus (Bahasa Latin: calculus, artinya "batu kecil", untuk menghitung) adalah cabang ilmu matematikayang mencakup limit, turunan, integral, dan deret takterhingga. Kalkulus adalah ilmu mengenai perubahan, sebagaimana geometri adalah ilmu mengenai bentuk dan aljabar adalah ilmu mengenai pengerjaan untuk memecahkan persamaan serta aplikasinya. Kalkulus memiliki aplikasi yang luas dalam bidang-bidang sains, ekonomi, dan teknik; serta dapat memecahkan berbagai masalah yang tidak dapat dipecahkan dengan aljabar elementer.
Kalkulus memiliki dua cabang utama, kalkulus diferensial dan kalkulus integral yang saling berhubungan melalui teorema dasar kalkulus. Pelajaran kalkulus adalah pintu gerbang menuju pelajaran matematika lainnya yang lebih tinggi, yang khusus mempelajari fungsi dan limit, yang secara umum dinamakan analisis matematika.
Prinsip-prinsip dasar
Limit dan kecil tak terhingga

Definisi limit: kita katakan bahwa limit f(x) ketika x mendekati titik p adalah L apabila untuk setiap bilangan ε > 0 apapun, terdapat bilangan δ > 0, sedemikian rupanya: 
Kalkulus pada umumnya dikembangkan dengan memanipulasi sejumlah kuantitas yang sangat kecil. Objek ini, yang dapat diperlakukan sebagai angka, adalah sangat kecil. Sebuah bilangan dx yang kecilnya tak terhingga dapat lebih besar daripada 0, namun lebih kecil daripada bilangan apapun pada deret 1, ½, ⅓, ... dan bilangan real positif apapun. Setiap perkalian dengan kecil tak terhingga (infinitesimal) tetaplah kecil tak terhingga, dengan kata lain kecil tak terhingga tidak memenuhi properti Archimedes. Dari sudut pandang ini, kalkulus adalah sekumpulan teknik untuk memanipulasi kecil tak terhingga.
Pada abad ke-19, konsep kecil tak terhingga ini ditinggalkan karena tidak cukup cermat, sebaliknya ia digantikan oleh konsep limit. Limit menjelaskan nilai suatu fungsi pada nilai input tertentu dengan hasil dari nilai input terdekat. Dari sudut pandang ini, kalkulus adalah sekumpulan teknik memanipulasi limit-limit tertentu. Secara cermat, definisi limit suatu fungsi adalah:
Diberikan fungsi f(x) yang terdefinisikan pada interval di sekitar p, terkecuali mungkin pada p itu sendiri. Kita mengatakan bahwa limitf(x) ketika x mendekati p adalah L, dan menuliskan:

jika, untuk setiap bilangan ε > 0, terdapat bilangan δ > 0 yang berkoresponden dengannya sedemikian rupanya untuk setiap x:

Turunan
Turunan dari suatu fungsi mewakili perubahan yang sangat kecil dari fungsi tersebut terhadap variabelnya. Proses menemukan turunan dari suatu fungsi disebut sebagai pendiferensialan ataupun diferensiasi.
Secara matematis, turunan fungsi ƒ(x) terhadap variabel x adalah ƒ′ yang nilainya pada titik x adalah:
 ,
,
dengan syarat limit tersebut eksis. Jika ƒ′ eksis pada titik x tertentu, kita katakan bahwa ƒ terdiferensialkan (memiliki turunan) pada x, dan jika ƒ′ eksis di setiap titik pada domain ƒ, kita sebut ƒ terdiferensialkan.
Apabila z = x + h, h = x - z, dan h mendekati 0 jika dan hanya jika z mendekati x, maka definisi turunan di atas dapat pula kita tulis sebagai:

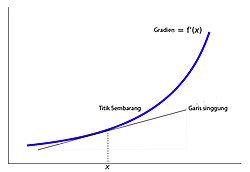
Garis singgung pada (x, f(x)). Turunan f'(x) sebuah kurva pada sebuah titik adalah kemiringan dari garis singgung yang menyinggung kurva pada titik tersebut. Perhatikan bahwa ekspresi  pada definisi turunan di atas merupakan gradien dari garis sekan yang melewati titik (x,ƒ(x)) dan (x+h,ƒ(x)) pada kurva ƒ(x). Apabila kita mengambil limit h mendekati 0, maka kita akan mendapatkan kemiringan dari garis singgung yang menyinggung kurva ƒ(x) pada titik x. Hal ini berarti pula garis singgung suatu kurva merupakan limit dari garis sekan, demikian pulanya turunan dari suatu fungsi ƒ(x) merupakan gradien dari fungsi tersebut.
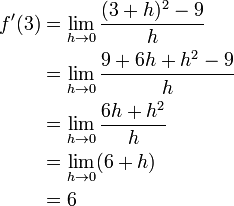
pada definisi turunan di atas merupakan gradien dari garis sekan yang melewati titik (x,ƒ(x)) dan (x+h,ƒ(x)) pada kurva ƒ(x). Apabila kita mengambil limit h mendekati 0, maka kita akan mendapatkan kemiringan dari garis singgung yang menyinggung kurva ƒ(x) pada titik x. Hal ini berarti pula garis singgung suatu kurva merupakan limit dari garis sekan, demikian pulanya turunan dari suatu fungsi ƒ(x) merupakan gradien dari fungsi tersebut. Sebagai contoh, untuk menemukan gradien dari fungsi f(x) = x2 pada titik (3,9):
Ilmu yang mempelajari definisi, properti, dan aplikasi dari turunan atau kemiringan dari sebuah grafik disebut kalkulus diferensial

Garis singgung sebagai limit dari garis sekan. Turunan dari kurva f(x) di suatu titik adalah kemiringan dari garis singgung yang menyinggung kurva pada titik tersebut. Kemiringan ini ditentukan dengan memakai nilai limit dari kemiringan garis sekan.
Notasi pendiferensialan
Terdapat berbagai macam notasi matematika yang dapat digunakan digunakan untuk menyatakan turunan, meliputi notasi Leibniz, notasi Lagrange, notasi Newton, dan notasi Euler.
Notasi Leibniz diperkenalkan oleh Gottfried Leibniz dan merupakan salah satu notasi yang paling awal digunakan. Ia sering digunakan terutama ketika hubungan antar y = ƒ(x) dipandang sebagai hubungan fungsional antara variabel bebas dengan variabel terikat. Turunan dari fungsi tersebut terhadap x ditulis sebagai:
 ataupun
ataupun 
Notasi Lagrange diperkenalkan oleh Joseph Louis Lagrange dan merupakan notasi yang paling sering digunakan. Dalam notasi ini, turunan fungsi ƒ(x) ditulis sebagai ƒ′(x) ataupun hanya ƒ′.
Notasi Newton, juga disebut sebagai notasi titik, menempatkan titik di atas fungsi untuk menandakan turunan. Apabila y = ƒ(t), maka  mewakili turunan y terhadap t. Notasi ini hampir secara eksklusif digunakan untuk melambangkan turunan terhadap waktu. Notasi ini sering terlihat dalam bidang fisika dan bidang matematika yang berhubungan dengan fisika.
mewakili turunan y terhadap t. Notasi ini hampir secara eksklusif digunakan untuk melambangkan turunan terhadap waktu. Notasi ini sering terlihat dalam bidang fisika dan bidang matematika yang berhubungan dengan fisika. Notasi Euler menggunakan operator diferensial D yang diterapkan pada fungsi ƒ untuk memberikan turunan pertamanya Df. Apabila y = ƒ(x) adalah variabel terikat, maka sering kali x dilekatkan pada D untuk mengklarifikasikan keterbebasan variabel x. Notasi Euler kemudian ditulis sebagai:
 atau
atau  .
.
Notasi Euler ini sering digunakan dalam menyelesaikan persamaan diferensial linear.
| Notasi Leibniz | Notasi Lagrange | Notasi Newton | Notasi Euler |
|---|
| Turunan ƒ(x) terhadap x |  | ƒ′(x) |
dengan y = ƒ(x) | |
Integral

Integral dapat dianggap sebagai perhitungan luas daerah di bawah kurva ƒ(x), antara dua titik adan b. Integral merupakan suatu objek matematika yang dapat diinterpretasikan sebagai luas wilayah ataupun generalisasi suatu wilayah. Proses menemukan integral suatu fungsi disebut sebagai pengintegralan ataupun integrasi. Integral dibagi menjadi dua, yaitu: integral tertentu dan integral tak tentu. Notasi matematika yang digunakan untuk menyatakan integral adalah  , seperti huruf S yang memanjang (S singkatan dari "Sum" yang berarti penjumlahan).
, seperti huruf S yang memanjang (S singkatan dari "Sum" yang berarti penjumlahan).
Integral tertentu
Diberikan suatu fungsi ƒ bervariabel real x dan interval antara [a, b] pada garis real, integral tertentu:

secara informal didefinisikan sebagai luas wilayah pada bidang xy yang dibatasi oleh kurva grafik ƒ, sumbu-x, dan garis vertikal x = a dan x = b.
Pada notasi integral di atas: a adalah batas bawah dan b adalah batas atas yang menentukan domain pengintegralan, ƒ adalah integran yang akan dievaluasi terhadap x pada interval [a,b], dan dx adalah variabel pengintegralan.

Seiring dengan semakin banyaknya subinterval dan semakin sempitnya lebar subinterval yang diambil, luas keseluruhan batangan akan semakin mendekati luas daerah di bawah kurva. Terdapat berbagai jenis pendefinisian formal integral tertentu, namun yang paling umumnya digunakan adalah definisi integral Riemann. Integral Rieman didefinisikan sebagai limit daripenjumlahan Riemann. Misalkanlah kita hendak mencari luas daerah yang dibatasi oleh fungsi ƒ pada interval tertutup [a,b]. Dalam mencari luas daerah tersebut, interval [a,b] dapat kita bagi menjadi banyak subinterval yang lebarnya tidak perlu sama, dan kita memilih sejumlah n-1 titik {x1, x2, x3,..., xn - 1} antara a dengan b sehingga memenuhi hubungan:
-

Himpunan  tersebut kita sebut sebagai partisi[a,b], yang membagi [a,b] menjadi sejumlah n subinterval
tersebut kita sebut sebagai partisi[a,b], yang membagi [a,b] menjadi sejumlah n subinterval ![[x_0, x_1], [x_1,x_2], \ldots, [x_{n-1}, x_n]](http://upload.wikimedia.org/wikipedia/id/math/7/9/b/79beb5191713ec5bd330992f316899ed.png) . Lebar subinterval pertama [x0,x1] kita nyatakan sebagai Δx1, demikian pula lebar subinterval ke-i kita nyatakan sebagai Δxi = xi - xi - 1. Pada tiap-tiap subinterval inilah kita pilih suatu titik sembarang dan pada subinterval ke-i tersebut kita memilih titik sembarang ti. Maka pada tiap-tiap subinterval akan terdapat batangan persegi panjang yang lebarnya sebesar Δx dan tingginya berawal dari sumbu x sampai menyentuh titik (ti, ƒ(ti)) pada kurva. Apabila kita menghitung luas tiap-tiap batangan tersebut dengan mengalikan ƒ(ti)· Δxi dan menjumlahkan keseluruhan luas daerah batangan tersebut, kita akan dapatkan:
. Lebar subinterval pertama [x0,x1] kita nyatakan sebagai Δx1, demikian pula lebar subinterval ke-i kita nyatakan sebagai Δxi = xi - xi - 1. Pada tiap-tiap subinterval inilah kita pilih suatu titik sembarang dan pada subinterval ke-i tersebut kita memilih titik sembarang ti. Maka pada tiap-tiap subinterval akan terdapat batangan persegi panjang yang lebarnya sebesar Δx dan tingginya berawal dari sumbu x sampai menyentuh titik (ti, ƒ(ti)) pada kurva. Apabila kita menghitung luas tiap-tiap batangan tersebut dengan mengalikan ƒ(ti)· Δxi dan menjumlahkan keseluruhan luas daerah batangan tersebut, kita akan dapatkan: 
Penjumlahan Sp disebut sebagai penjumlahan Riemann untuk ƒ pada interval [a,b]. Perhatikan bahwa semakin kecil subinterval partisi yang kita ambil, hasil penjumlahan Riemann ini akan semakin mendekati nilai luas daerah yang kita inginkan. Apabila kita mengambil limit dari norma partisi  mendekati nol, maka kita akan mendapatkan luas daerah tersebut.
mendekati nol, maka kita akan mendapatkan luas daerah tersebut. Secara cermat, definisi integral tertentu sebagai limit dari penjumlahan Riemann adalah:
Diberikan ƒ(x) sebagai fungsi yang terdefinisikan pada interval tertutup [a,b]. Kita katakan bahwa bilangan I adalahintegral tertentu ƒ di sepanjang [a,b] dan bahwa I adalah limit dari penjumlahan Riemann  apabila kondisi berikut dipenuhi: Untuk setiap bilangan ε > 0 apapun terdapat sebuah bilangan δ > 0 yang berkorespondensi dengannya sedemikian rupanya untuk setiap partisi
apabila kondisi berikut dipenuhi: Untuk setiap bilangan ε > 0 apapun terdapat sebuah bilangan δ > 0 yang berkorespondensi dengannya sedemikian rupanya untuk setiap partisi  di sepanjang [a,b] dengan
di sepanjang [a,b] dengan  dan pilihan ti apapun pada [xk - 1, ti], kita dapatkan
dan pilihan ti apapun pada [xk - 1, ti], kita dapatkan -

Secara matematis dapat kita tuliskan:

Apabila tiap-tiap partisi mempunyai sejumlah n subinterval yang sama, maka lebar Δx = (b-a)/n, sehingga persamaan di atas dapat pula kita tulis sebagai:

Limit ini selalu diambil ketika norma partisi mendekati nol dan jumlah subinterval yang ada mendekati tak terhingga banyaknya.
- Contoh
Sebagai contohnya, apabila kita hendak menghitung integral tertentu  , yakni mencari luas daerah A dibawah kurva y=x pada interval [0,b], b>0, maka perhitungan integral tertentu sebagai limit dari penjumlahan Riemannnya adalah
, yakni mencari luas daerah A dibawah kurva y=x pada interval [0,b], b>0, maka perhitungan integral tertentu sebagai limit dari penjumlahan Riemannnya adalah 
Pemilihan partisi ataupun titik ti secara sembarang akan menghasilkan nilai yang sama sepanjang norma partisi tersebut mendekati nol. Apabila kita memilih partisi P membagi-bagi interval [0,b] menjadi n subinterval yang berlebar sama Δx = (b - 0)/n = b/n dan titik t'i yang dipilih adalah titik akhir kiri setiap subinterval, partisi yang kita dapatkan adalah:
 dan
dan  , sehingga:
, sehingga:

Seiring dengan n mendekati tak terhingga dan norma partisi mendekati 0, maka didapatkan: 
Dalam prakteknya, penerapan definisi integral tertentu dalam mencari nilai integral tertentu tersebut jarang sekali digunakan karena tidak praktis. Teorema dasar kalkulus (lihat bagian bawah) memberikan cara yang lebih praktis dalam mencari nilai integral tertentu.
Integral tak tentu
Manakala integral tertentu adalah sebuah bilangan yang besarnya ditentukan dengan mengambil limit penjumlahan Riemann, yang diasosiasikan dengan partisi interval tertutup yang norma partisinya mendekati nol, teorema dasar kalkulus (lihat bagian bawah) menyatakan bahwa integral tertentu sebuah fungsi kontinu dapat dihitung dengan mudah apabila kita dapat mencari antiturunan/antiderivatif fungsi tersebut.
Apabila

Keseluruhan himpunan antiturunan/antiderivatif sebuah fungsi ƒ adalah integral tak tentu ataupun primitif dari ƒterhadap x dan dituliskan secara matematis sebagai:

Ekspresi F(x) + C adalah antiderivatif umum ƒ dan C adalah konstanta sembarang.
Misalkan terdapat sebuah fungsi f(x) = x2, maka integral tak tentu ataupun antiturunan dari fungsi tersebut adalah:
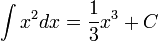
Perhatikan bahwa integral tertentu berbeda dengan integral tak tentu. Integral tertentu dalam bentuk  adalah sebuah bilangan, manakala integral tak tentu :
adalah sebuah bilangan, manakala integral tak tentu : adalah sebuah fungsi yang memiliki tambahan konstanta sembarang C.
adalah sebuah fungsi yang memiliki tambahan konstanta sembarang C.
Teorema dasar
Teorema dasar kalkulus menyatakan bahwa turunan dan integral adalah dua operasi yang saling berlawanan. Lebih tepatnya, teorema ini menghubungkan nilai dari anti derivatif dengan integral tertentu. Karena lebih mudah menghitung sebuah anti derivatif daripada menerapkan definisi integral tertentu, teorema dasar kalkulus memberikan cara yang praktis dalam menghitung integral tertentu.
Teorema dasar kalkulus menyatakan:
Jika sebuah fungsi f adalah kontinu pada interval [a,b] dan jika F adalah fungsi yang mana turunannya adalah fpada interval (a,b), maka

Lebih lanjut, untuk setiap x di interval (a,b),

Sebagai contohnya apabila kita hendak menghitung nilai integral  , daripada menggunakan definisi integral tertentu sebagai limit dari penjumlahan Riemann (lihat bagian atas), kita dapat menggunakan teorema dasar kalkulus dalam menghitung nilai integral tersebut. Anti derivatif dari fungsi
, daripada menggunakan definisi integral tertentu sebagai limit dari penjumlahan Riemann (lihat bagian atas), kita dapat menggunakan teorema dasar kalkulus dalam menghitung nilai integral tersebut. Anti derivatif dari fungsi  adalah
adalah  . Oleh sebab itu, sesuai dengan teorema dasar kalkulus, nilai dari integral tertentu adalah:
. Oleh sebab itu, sesuai dengan teorema dasar kalkulus, nilai dari integral tertentu adalah: 
Apabila kita hendak mencari luas daerah A dibawah kurva y=x pada interval [0,b], b>0, maka kita akan dapatkan:

Perhatikan bahwa hasil yang kita dapatkan dengan menggunakan teorema dasar kalkulus ini adalah sama dengan hasil yang kita dapatkan dengan menerapkan definisi integral tertentu (lihat bagian atas). Oleh karena lebih praktis, teorema dasar kalkulus sering digunakan untuk mencari nilai integral tertentu.
Aplikasi

Pola spiral logaritma cangkang Nautilus adalah contoh klasik untuk menggambarkan perkembangan dan perubahan yang berkaitan dengan kalkulus. Kalkulus digunakan di setiap cabang sains fisik, sains komputer, statistik, teknik, ekonomi,bisnis, kedokteran, kependudukan, dan di bidang-bidang lainnya. Setiap konsep di mekanika klasik saling berhubungan melalui kalkulus. Massa dari sebuah benda dengan massa jenis yang tidak diketahui, momen inersia dari suatu objek, dan total energi dari sebuah objek dapat ditentukan dengan menggunakan kalkulus.
Dalam subdisiplin listrik dan magnetisme, kalkulus dapat digunakan untuk mencari total fluks dari sebuah medan elektromagnetik . Contoh historis lainnya adalah penggunaan kalkulus di hukum gerak Newton, dinyatakan sebagai laju perubahan yang merujuk pada turunan: Laju perubahan momentum dari sebuah benda adalah sama dengan resultan gaya yang bekerja pada benda tersebut dengan arah yang sama.
Bahkan rumus umum dari hukum kedua Newton: Gaya = Massa × Percepatan, menggunakan perumusan kalkulus diferensial karena percepatan bisa dinyatakan sebagai turunan dari kecepatan. Teori elektromagnetik Maxwell dan teori relativitas Einstein juga dirumuskan menggunakan kalkulus diferensial.















 , dan n adalah banyaknya kolom dari matriks
, dan n adalah banyaknya kolom dari matriks  , atau ditulis
, atau ditulis  .
.
 maka dikatakan matriks A dan B saling invers. B disebut invers dari A, atau ditulis
maka dikatakan matriks A dan B saling invers. B disebut invers dari A, atau ditulis  . Matriks yang mempunyai invers disebut invertible atau matriks non singular, sedangkan matriks yang tidak mempunyai invers disebut matriks singular.
. Matriks yang mempunyai invers disebut invertible atau matriks non singular, sedangkan matriks yang tidak mempunyai invers disebut matriks singular. dengan
dengan  , maka invers dari matriks A (ditulis
, maka invers dari matriks A (ditulis 
 maka matriks tersebut tidak mempunyai invers, atau disebut matriks singular.
maka matriks tersebut tidak mempunyai invers, atau disebut matriks singular.^{-1} = B^{-1} \cdot A^{-1}")
^{-1} = A^{-1} \cdot B^{-1}")
^t =(A^{t})^{-1}")





















 R terdefinisi pada garis bilangan riil, dan p, L
R terdefinisi pada garis bilangan riil, dan p, L  R maka kita menyebut limit f ketika x mendekati p adalah L, yang ditulis sebagai:
R maka kita menyebut limit f ketika x mendekati p adalah L, yang ditulis sebagai:








